単一軸の動きの制御
を参照してください PLCopenSingle.project のインストールディレクトリにあるサンプルプロジェクト CODESYS 下 ..\CODESYS SoftMotion\Examples。
この例は、PLCopenの標準化された機能ブロックを使用してドライブを制御する方法を示しています。
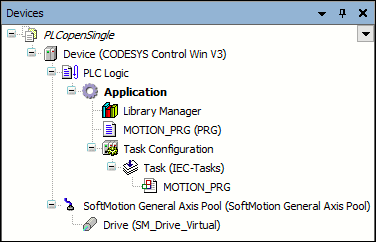
名前の付いた仮想ドライブを挿入します
Drive下のデバイスツリーで SoftMotion一般軸プール。作成する MOTION_PRG STのプログラム。
PROGRAM MOTION_PRG VAR iStatus: INT; Power: MC_Power; MoveAbsolute: MC_MoveAbsolute; p:REAL:=100; END_VAR CASE iStatus OF // initialization of the axis 0: Power(Enable:=TRUE, bRegulatorOn:=TRUE, bDriveStart:=TRUE, Axis:=Drive); IF Power.Status THEN iStatus := iStatus + 1; END_IF // Move the axis to position p by use of the MC_MoveAbsolute function block 1: MoveAbsolute(Execute:=TRUE, Position:= p, Velocity:=100, Acceleration:=100, Deceleration:=100, Axis:=Drive); IF MoveAbsolute.Done THEN MoveAbsolute(Execute:=FALSE, Axis:=Drive); iStatus := iStatus + 1; END_IF // Move the axis back to position 0 by use of the MC_MoveAbsolute function block: 2: MoveAbsolute(Execute:=TRUE, Position:= 0, Velocity:=100, Acceleration:=100, Deceleration:=100, Axis:=Drive); IF MoveAbsolute.Done THEN MoveAbsolute(Execute:=FALSE, Axis:=Drive); iStatus := 1; END_IFMOTION_PRGプログラムの呼び出しをタスクに追加します 主な任務。
デバイスツリー:
プロジェクトをコントローラーにダウンロードして開始します。
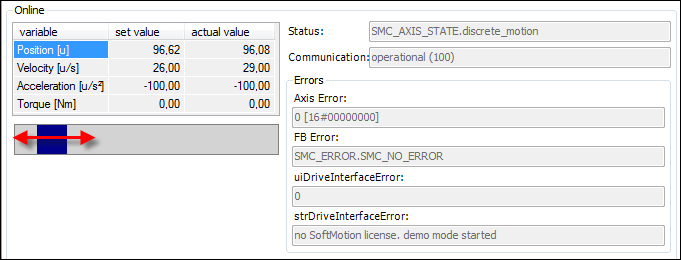
を開きます ドライブ エディターの仮想軸。
の中に オンライン の一部 全般的 タブ、あなたは軸の動きを見る。